Uitdaging: robots die breekbare en delicate voorwerpen kunnen hanteren
Eén van de voornaamste uitdagingen in de robotica is het aanpassen van de kracht die nodig is om delicate objecten vast te houden en te hanteren. Amerikaanse onderzoekers ontwikkelden echter nieuwe concepten die hier een antwoord op bieden. Ze testten hun bevindingen uit op ondermeer eieren.
Drukgevoelige elektronische kunsthuid
Ingenieurs aan Berkeley University, ontwikkelden een drukgevoelig elektronisch materiaal dat gemaakt is van anorganische, enkelvoudige kristallijne halfgeleiders. Door dit te verwerken onder vorm van nanodraden bekwamen ze een zeer flexibel materiaal dat ideaal is voor hoog performante, mechanisch plooibare elektronica en sensoren. Bovendien staat het chemisch stabiele kristallijn silicium bekend om zijn excellente elektrische eigenschappen dat werkt aan een laag vermogen. De onderzoekers slaagden er als eersten in om dergelijke nanodraadmaterialen op macroschaal te ordenen in een functioneel systeem, zijnde een elektronische huid die geschikt is voor bijvoorbeeld robottoepassingen (Figuur 1).
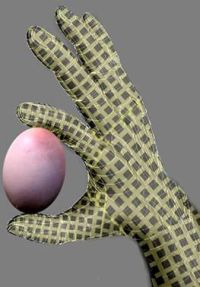
Figuur 1. Hand bedekt met de elektronische kunsthuid, geschikt voor prothese- en robottoepassingen (Bron: UC Berkeley)
Zeestervormige grijper
Aan Harvard University werd een zeestervormige grijper ontwikkeld die samengesteld is uit kunststoffen met verschillende elasticiteiten. Door de armen van de zeesterstructuur aan de buitenkant te voorzien van meer uitrekbare wanden, slaagden de onderzoekers er in om deze gericht te laten buigen door eenvoudigweg opblazen. Vervolgens konden ze de gewenste grijpbeweging ‘programmeren’ via een bepaalde combinatie van twee verschillende stijve siliconen elastomeren. Dit maakt dat de zeesterstructuur zich bij het opblazen rond een voorwerp krult zoals de vingers van een hand. De aanraking en het grijpen is zo zacht dat het concept gebruikt kan worden om bijvoorbeeld eieren of zachte fruitsoorten met de nodige omzichtigheid te hanteren. Een bijkomend voordeel is dat, in tegenstelling tot klassieke robotarmen, er geen complexe nauwkeurig afgestelde sturing met sensoren nodig is.
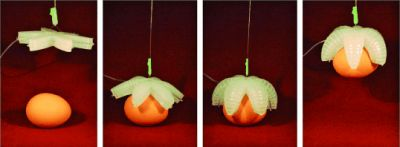
Figuur 2. Werking van de zeestervormige grijper. Eerst wordt de grijper op het voorwerp (in dit geval een ei) geplaatst. Vervolgens wordt er lucht in de grijper geblazen, waardoor de vingers zich rond het voorwerp sluiten. (Bron: Ilievski et al., 2011, Angewandte Chemie, WILEY-VCH Verlag)
Grijper zonder vingers
Onderzoekers aan Cornell University, de universiteit van Chicago en iRobot Corp stapten af van het traditionele ontwerp van een structuur met vingers. Ze bedachten een veelzijdige grijper op basis van een latex ballon, gevuld met gemalen koffie, die zich weet aan te passen aan de vorm van zeer diverse voorwerpen. Ook deze grijper werd ondermeer op eieren uitgetest (zie filmpje).
De met gemalen koffie gevulde ballon wordt zachtjes neergedrukt op een voorwerp en vormt zich hierdoor rondom dit voorwerp. Daarna wordt de ballon vacuüm gezogen, waardoor de greep op het object verstevigt. Wordt het vacuüm losgelaten, dan wordt de ballon weer zacht en laat zijn greep los.
De onderzoekers kozen voor gemalen koffie omdat dit lichte materiaal typisch uit grote aggregaten van individuele, vaste deeltjes bestaat die makkelijk over elkaar rollen en vloeien wanneer ze niet op elkaar gedrukt worden. Onder druk pakken ze zich echter samen tot een stevig, vast geheel. Alternatieve vullingen op basis van rijst of couscous werden eveneens uitgetest. Of hoe voeding op een onverwachte manier technologie een handje vooruit helpt…

Figuur 3. De grijper past zich volledig aan de vorm aan van het op te lichten voorwerp (Bron: Cornell University)
Bronnen
- Sirris Techniline 29-10-2010 Kunsthuid laat robots breekbare objecten met zachtheid hanteren, contact: pieter.kesteloot@sirris.be
- Sirris Techniline 25-02-2011 Nieuwe concepten voor robotgrijpers hanteren delicate voorwerpen, contact harry.sools@sirris.be of Sven.DeTroy@sirris.be
- Persbericht UC Berkeley: Engineers make artificial skin out of nanowires
- Filip Ilievski, Aaron D. Mazzeo, Robert F. Shepherd, Xin Chen, George M. Whitesides (2011) Soft Robotics for Chemists. Angewandte Chemie, in press (DOI:10.1002/anie.201006464)
- Persbericht Cornell University: Balloon filled with ground coffee makes ideal robotic gripper
Nuttige link
Agoria - Food equipment: fabrikanten, invoerders en installateurs van uitrusting voor de voedingssector
