X-stralen technologie is een veel gebruikte technologie voor het detecteren van vreemde voorwerpen en het uitvoeren van kwaliteitscontroles, met toepassingen niet enkel in de voedingsindustrie maar ook in tal van andere sectoren zoals de biomedische sector en de ‘automotive’ sector. Toegepast op voedingsproducten bieden X-stralen het voordeel dat ze tijdens hun passage doorheen het product structuren in beeld kunnen brengen die duidelijk verschillen van de omgevingsmatrix voor wat betreft hun absorptiecapaciteit voor X-stralen (wat samenhangt met dichtheid). De feitelijke analyse kan dan gebeuren door menselijke inspectie van de bekomen afbeelding maar, zeker voor industriële toepassingen, ook door gebruik te maken van geautomatiseerde analysesystemen. Deze laatste systemen verdienen de voorkeur aangezien dergelijke systemen objectief en voor de volle 100% reproduceerbaar zijn. Bovendien kunnen dergelijke analysesystemen zeer gevoelig werken, zoals blijkt uit onderzoek van Mery et al (2011), waarbij door integratie van doorgedreven beeldverwerking en geavanceerde data-analysetechnieken het experimenteel mogelijk werd gemaakt om visgraten te detecteren in verse zalm- en forelfilets.

Figuur 1. Detectie van visgraten met behulp van X-stralen technologie, een kwestie van het toepassen van een doorgedreven beeldverwerking en data-analyse!
Data-analyse, een complex maar noodzakelijk proces
Detectie van visgraten met X-stralen technologie is een hele uitdaging vanwege het beperkte contrast tussen visweefsel en -graat in het bekomen ruwe beeld. Mery et al (2011) slaagden er echter in te achterhalen of er al dan niet graten aanwezig zijn in specifieke regio’s door het uitvoeren van een doorgedreven beeldverwerking. Achtereenvolgens werden in dit proces verschillende stappen uitgevoerd (Figuur 2), waarvan de belangrijkste zijn: het verwerven van het ruwe digitale beeld; de ‘pre-processing’ van het beeld met bijhorende segmentatie; de extractie van de relevante informatie uit het beeld en dan tenslotte de classificatie van de detectieramen in het beeld als graat of niet-graat.
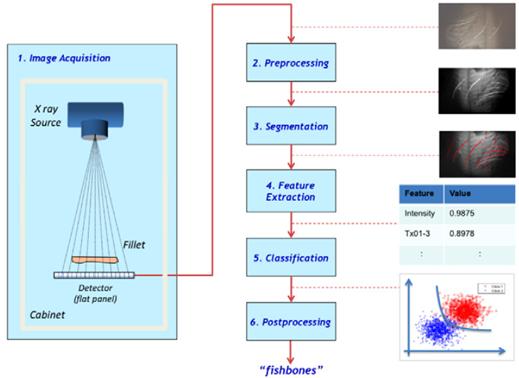
Figuur 2. Schematische voorstelling van de methodologie die het mogelijk maakt om visgraten met behulp van X-stralen technologie te detecteren. [Bron Mery et al (2011)]
Voor het maken van de opnames werd een standaard X-stralen systeem (een batterijgevoede Poskom PXM-20BT) gebruikt in combinatie met een digitaal detectorsysteem (een Cannon CXDI-50G ‘flat panel detector’) waarop verschillende zalmfilet stalen gepositioneerd werden. De ‘pre-processing’ van een beeld bestond uit verschillende deelstappen. In eerste instantie werden de bekomen grijswaarden van het originele X-stralen beeld versterkt via een lineaire modificatie, in combinatie met een 'band pass' filterfunctie. Dit leidde tot een contrast verhoging aan de grens tussen graat en niet-graat zones. Een verdere selectie omvatte een ‘treshold’-analyse waarbij enkel pixels werden weerhouden met een grijswaarde boven een bepaalde grenswaarde. Kortom, de ‘pre-processing’ en segmentatie van het digitale beeld (Figuur 2) leverde ‘hot spot’ regio’s op in het beeld waarin graten gelokaliseerd konden zijn. Deze regio’s maakten samen gemiddeld zo’n 12% van een zalmfilet beeld uit.
Om nu de aan- of afwezigheid van graten in de ‘hot spot’ regio’s aan te duiden, werden in een trainingsfase, op basis van a priori kennis, fijnmazige detectieramen (bestaande uit 10x10 pixels) gedefinieerd als zijnde zones met een graat of als graatloze zones. Van de verschillende zones werden tal van intensiteits- en textuurkarakteristieken geëxtraheerd (279 in totaal!). Nadien werd bekeken met welke specifieke parameters een goede performantie werd bekomen voor het detecteren van de twee verschillende zones. Uit deze statistische analyse bleek dat 24 parameters voldoende waren voor het maken van een maximaal onderscheid tussen de zones (met een performantie van ongeveer 95%). Zo werd een beeld gegenereerd, bestaande uit verschillende pixels met waarde 1 (aanwezigheid van graten) of met waarde 0 (afwezigheid van graten). Tenslotte werden zones met waarde 1 die te klein zijn in grootte, verwijderd en aangeduid met 0 (Figuur 3).
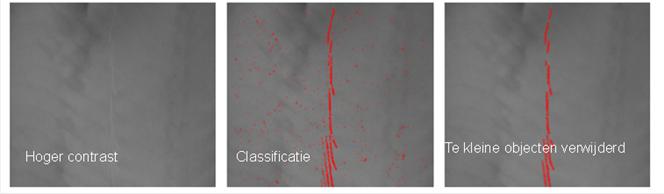
Figuur 3. Illustratie van drie belangrijke stappen in het beeldverwerkingsproces: intensiteitsversterking van het ruwe beeld (1e stap in de ‘pre-processing’),classificatie (midden) en finale detectie van graten (rechts) [Bron Mery et al (2011)]
Experimentele validatie
Vervolgens werd in een validatie-experiment onderzocht of het mogelijk was om met behulp van de ontwikkelde technologie, graten te selecteren op basis van grootte. Drie verschillende klassen werden initieel onderscheiden: graten kleiner dan 8.5 mm, graten groter dan 8.5 mm en kleiner dan 12 mm, en graten groter dan 12 mm. Kruisvalidatie-experimenten toonden aan dat het mogelijk was om graten te identificeren en te classificeren met een performantie van 100% (grote klasse), 98.5% (medium klasse), en 93.5% (kleine klasse).
In een tweede validatie-experiment (op forelfilets) werden graten (met afmetingen tussen de 14 en de 47 mm) manueel op visfilets geplaatst waarbij dus het aantal graten op voorhand gekend is. Hoewel in principe de graten zich binnenin de visfilets bevinden, werden toch gelijkaardige ruwe afbeeldingen bekomen. Door gebruik te maken van het voorheen ontwikkelde detectie en classificatie algoritme (dus zonder nieuwe training-experimenten), werden opnieuw alle visgraten probleemloos gedetecteerd (met 1% aan vals positieve resultaten).
Toepasbaarheid in de praktijk
Uit dit artikel blijkt dat het mogelijk is om op een automatische manier visgraten te detecteren in verse forel- en zalmfilets door middel van X-stralen technologie. Bij deze applicatie speelt de performantie van het X-stralen systeem een minder grote rol dan het opstellen van geschikte data-analyse modellen voor het uitvoeren van een correcte classificatie. Deze technologie biedt dus potentieel als kwaliteitscontrolesysteem. Toch moet men er rekening mee houden dat de experimentele opzet gebruik maakte van een afgesloten loden kast waar de visfilets één voor één in gelegd dienden te worden en waarin optimale stralingscondities konden worden aangelegd. Ook is de vraag of de visgraatdetectie werkt op ingevroren visfilets (werd niet onderzocht). Mery et al (2011) gaven als verder nadeel voor praktische implementatie aan dat transmissie van de verworven X-stralen afbeeldingen van de detector naar de PC te lang (12 s) duurde voor ‘real time’ applicaties. Een digitaal ‘live’ X-stralen systeem zou dit probleem echter kunnen verhelpen.
Nuttige links
- X-stralen generator toegepast in het onderzoek: Poskom
- Sensors For Food Dienstverlening: bent u op zoek naar informatie over sensoren die toegepast worden in de voedingssector of heeft u een specifiek probleem dat aangepakt kan worden met sensoren? Laat het dan weten via het Sensors For Food aanspreekpunt of contacteer Steven Vermeir, steven.vermeir@biw.kuleuven.be
Bronnen
- Mery D., Lillo I., Loebel ., Riffo V., Soto A., Cipriano A., Aguilera J. M. (2011) Automated fish bone detection using X-ray imaging. Journal of Food Engineering, 105, 485–492. DOI: 10.1016/j.jfoodeng.2011.03.007.